Trong các hệ thống robot đa trục, độ chính xác về vị trí, độ lặp lại và khả năng phản hồi động của bộ phận tác động cuối không được xác định chỉ bằng độ phức tạp của thuật toán điều khiển. Về cơ bản, chúng bị hạn chế bởi băng thông cơ học, đặc tính phản ứng ngược và mật độ mô-men xoắn của các bộ truyền động khớp riêng lẻ tạo nên chuỗi động học. Một rô-bốt có khớp nối sáu trục với độ chính xác của bộ tác động cuối dưới milimet yêu cầu mỗi khớp phải cung cấp độ phân giải định vị góc trong phạm vi cung giây, với độ cứng xoắn giúp ngăn ngừa độ lệch dưới mô men do tải trọng gây ra.
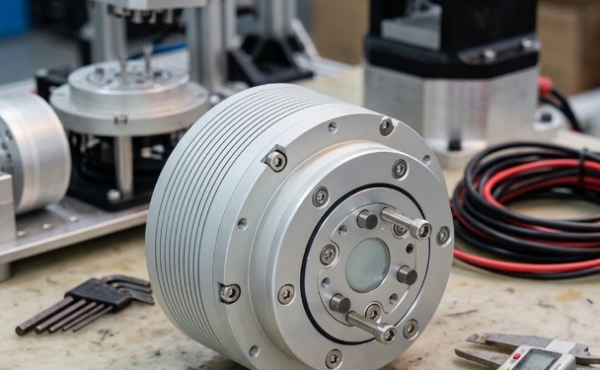
Thiết bị truyền động động cơ chung Robot: ND-A5215-10 của iHF Group đại diện cho một giải pháp được thiết kế có mục đích cho lớp ràng buộc này. Thay vì lắp ráp các động cơ servo, hộp số và bộ mã hóa chung thành một cấu hình chung, Tập đoàn iHF đã tích hợp các hệ thống con này vào một mô-đun truyền động thống nhất được tối ưu hóa đặc biệt cho động lực học cơ, nhiệt và điều khiển của khớp nối robot.

Kiến trúc cơ điện tích hợp
Cấu trúc liên kết động cơ mô-men xoắn không khung
Các thiết kế khớp robot truyền thống sử dụng động cơ servo gắn liền với hộp số dẫn động hành tinh hoặc điều hòa thông qua khớp nối cơ khí. Việc lắp ráp này gây ra các lỗi căn chỉnh, phản ứng ngược khớp nối và chiều dài trục tăng lên làm ảnh hưởng đến độ nén của khớp và phản ứng động.
ND-A5215-10 sử dụng kiến trúc động cơ mô-men xoắn không khung, trong đó rôto được tích hợp trực tiếp vào trục đầu ra khớp và stato vào vỏ khớp. Việc loại bỏ vỏ động cơ riêng biệt và giao diện khớp nối này giúp giảm chiều dài khớp từ 30-40% so với các cụm thông thường, cho phép tỷ lệ tải trọng trên trọng lượng cao hơn và vỏ robot nhỏ gọn hơn. Động cơ mô-men xoắn truyền động trực tiếp cung cấp mô-men xoắn liên tục 15 Nm với công suất cực đại 45 Nm, cung cấp mật độ mô-men xoắn cao ở tốc độ thấp mà khớp nối rô-bốt yêu cầu mà không làm giảm hiệu suất và phản ứng ngược khi giảm tốc nhiều giai đoạn.
Giảm độ chính xác của ổ đĩa hài
Trong khi động cơ mô-men xoắn không khung cung cấp mật độ mô-men xoắn tuyệt vời thì tốc độ đầu ra cần thiết cho cấu hình chuyển động khớp robot thông thường (thường là 30-120 vòng/phút) lại đòi hỏi phải giảm tốc độ. ND-A5215-10 tích hợp bộ giảm tốc truyền động hài hòa với tỷ số truyền 100:1, đạt được mức giảm một cấp với đặc tính phản ứng ngược bằng 0 mà các hệ thống hành tinh hoặc xích đạo không thể tái tạo được.
Công nghệ truyền động điều hòa sử dụng một đường uốn cong được biến dạng bởi một bộ tạo sóng dựa trên một đường cong tròn, tạo ra sự ăn khớp đồng thời nhiều răng giúp phân bổ tải trọng trên 30% số răng có sẵn. Hình học tương tác này mang lại khả năng lặp lại vị trí ±10 giây cung và độ cứng xoắn vượt quá 20.000 Nm/rad—các thông số kỹ thuật chuyển trực tiếp thành độ chính xác của bộ tác động cuối trong cấu hình nhiều trục.
Quá trình sản xuất thiết bị truyền động động cơ khớp rô-bốt chính xác của Tập đoàn iHF xác nhận các bộ phận truyền động điều hòa thông qua phép đo biên dạng của dạng răng uốn cong, hình học lỗ trục xoay tròn và độ đảo ổ trục của bộ tạo sóng. Lắp ráp kết hợp các giao thức tải trước để tối ưu hóa các mẫu tiếp xúc chia lưới mà không gây ra ứng suất uốn cong quá mức có thể ảnh hưởng đến tuổi thọ mỏi.
Kiến trúc phản hồi bộ mã hóa tuyệt đối kép
Điều khiển vị trí trong các khớp robot yêu cầu phản hồi ở hai điểm riêng biệt: vị trí rôto động cơ để điều khiển chuyển mạch và dòng điện vectơ, và vị trí trục đầu ra để đóng vòng lặp servo ở cấp độ khớp. ND-A5215-10 tích hợp bộ mã hóa tuyệt đối kép—bộ mã hóa đa vòng 23 bit trên rôto động cơ và bộ mã hóa một vòng 19 bit trên đầu ra truyền động điều hòa.
Cấu hình bộ mã hóa kép này cho phép các chiến lược điều khiển nâng cao: bù gợn sóng mô-men xoắn thông qua truyền tiếp vị trí động cơ, bù phản ứng ngược thông qua phản hồi vị trí đầu ra và phát hiện va chạm thông qua ước tính mô-men xoắn tức thời từ đạo hàm dòng điện và vị trí của động cơ. Mã hóa tuyệt đối loại bỏ trình tự dẫn đường khi bật nguồn, giảm thời gian khởi động robot và cho phép khôi phục vận hành an toàn sau khi dừng khẩn cấp.

Quản lý nhiệt và hiệu suất làm việc liên tục
Kỹ thuật đường dẫn nhiệt
Động cơ mô-men xoắn không có khung tạo ra tổn thất điện trở (I²R) trong cuộn dây stato phải được tiêu tán để ngăn chặn sự suy giảm cách điện và khử từ của nam châm rôto đất hiếm. Trong các cấu hình khớp nhỏ gọn trong đó động cơ được gắn bên trong vỏ khớp, việc làm mát bằng không khí thông thường là không thực tế.
ND-A5215-10 sử dụng mạch làm mát bằng chất lỏng được tích hợp vào vỏ khớp, với các đường dẫn chất làm mát được gia công vào cấu trúc hợp kim nhôm tiếp xúc trực tiếp với ngăn xếp cán stato. Thiết kế này đạt được điện trở nhiệt từ cuộn dây đến chất làm mát là 0,15 K/W, cho phép vận hành liên tục ở mô-men xoắn định mức với nhiệt độ đầu vào chất làm mát lên tới 35°C. Đối với các ứng dụng không có sẵn chất làm mát cơ sở, Tập đoàn iHF cung cấp biến thể làm mát bằng không khí được tối ưu hóa về mặt nhiệt với hình dạng cánh tản nhiệt mở rộng và đối lưu cưỡng bức bên trong.
Mô hình hóa và bảo vệ nhiệt
Tập đoàn iHF cung cấp các mô hình nhiệt được hiệu chỉnh theo cấu hình chuyển động cụ thể của robot, cho phép khách hàng dự đoán mức tăng nhiệt độ cuộn dây theo chu kỳ làm việc dự kiến. Cảm biến nhiệt độ tích hợp (PT1000 RTD được nhúng trong các đầu cuộn dây) cung cấp khả năng giám sát nhiệt theo thời gian thực với khả năng bảo vệ quá nhiệt giúp giảm lệnh hiện tại trước khi đạt đến ngưỡng hư hỏng.
Tích hợp cơ học và tiêu chuẩn hóa giao diện
Kiến trúc trục rỗng
ND-A5215-10 có lỗ xuyên tâm trung tâm có đường kính 15mm, cho phép đi qua cáp nguồn, dây tín hiệu, đường khí nén hoặc cáp quang qua tâm khớp thay vì định tuyến bên ngoài. Thiết kế trục rỗng này giúp loại bỏ sự phức tạp trong việc quản lý cáp trong rô-bốt nhiều trục, giảm rủi ro vướng víu trong quá trình chuyển động và duy trì hình dạng bên ngoài gọn gàng cho các ứng dụng rô-bốt cộng tác, nơi dự đoán sẽ có sự tiếp cận của con người.
Khả năng tương thích giao diện gắn kết
Tập đoàn iHF tiêu chuẩn hóa các giao diện cơ học ND-A5215-10 theo mẫu mặt bích ISO 9409-1, cho phép tích hợp trực tiếp với các cánh tay robot có sẵn trên thị trường mà không cần chế tạo bộ chuyển đổi tùy chỉnh. Trục đầu ra kết hợp một giao diện có khóa hoặc có khớp nối với khả năng truyền mô-men xoắn vượt quá đầu ra cực đại của bộ truyền động, ngăn ngừa lỗi giao diện trong điều kiện dừng hoặc va chạm.


Tích hợp hệ thống điều khiển
Giao thức truyền thông EtherCAT
ND-A5215-10 tích hợp thiết bị điện tử điều khiển servo với giao tiếp bus trường EtherCAT, cho phép thời gian chu kỳ là 1ms để cập nhật lệnh vị trí và 125μs để đóng vòng lặp mô-men xoắn. Băng thông liên lạc này hỗ trợ các thuật toán điều khiển chuyển động tiên tiến: kiểm soát trở kháng để hạn chế lực robot cộng tác, triệt tiêu rung động thông qua phản hồi tăng tốc ở cấp độ khớp và bảo trì dự đoán thông qua xu hướng thông số động cơ.
Tích hợp chức năng an toàn
Chức năng an toàn đối với SIL 3 / PL e đạt được thông qua giám sát vị trí dự phòng (bộ mã hóa kép có so sánh chéo), mạch tắt mô-men xoắn an toàn (STO) với khóa liên động phần cứng và điều khiển phanh an toàn cho các trục chịu tải trọng lực. Tập đoàn iHF cung cấp tài liệu an toàn bao gồm phân tích FMEDA và báo cáo thử nghiệm chèn lỗi để hỗ trợ quy trình đánh dấu CE và chứng nhận an toàn chức năng của khách hàng.
Miền ứng dụng
Robot cộng tác
Vỏ bọc nhỏ gọn, quán tính phản xạ thấp và khả năng điều khiển nhạy cảm với lực của ND-A5215-10 khiến nó phù hợp với các khớp nối rô-bốt hợp tác trong đó tương tác giữa con người và rô-bốt yêu cầu sự an toàn nội tại thông qua giám sát mô-men xoắn và vị trí thay vì bảo vệ bên ngoài. Khả năng điều khiển ngược cao của bộ truyền động điều hòa cho phép chuyển động tuân thủ khi tác dụng lực bên ngoài, với hệ thống điều khiển phát hiện lực tiếp xúc dưới 150N ở bộ tác động cuối.
Robot phẫu thuật và y tế
Các ứng dụng robot y tế yêu cầu khả năng tương thích khử trùng, khả năng tương thích điện từ cho môi trường phòng phẫu thuật và độ chính xác về vị trí để thao tác mô. Tập đoàn iHF cung cấp ND-A5215-10 với bề mặt hoàn thiện cấp y tế, chất bôi trơn tương thích sinh học và cụm cáp được bảo vệ đáp ứng yêu cầu tương thích điện từ IEC 60601-1.
Sản xuất chất bán dẫn và điện tử
Khả năng tương thích trong phòng sạch (ISO loại 3), tạo ra hạt tối thiểu và vận hành không rung là những yếu tố cần thiết trong xử lý tấm bán dẫn và lắp ráp thiết bị điện tử. Bộ truyền động điều hòa kèm theo và động cơ không khung của ND-A5215-10 giúp loại bỏ các mảnh vụn mài mòn của bàn chải, đồng thời cân bằng chính xác và tải trước vòng bi giảm thiểu việc truyền rung động đến thiết bị xử lý nhạy cảm.
Câu hỏi thường gặp
Câu hỏi: Khả năng tải trọng tối đa khi sử dụng ND-A5215-10 trong cấu hình robot sáu trục là bao nhiêu?
Trả lời: Khả năng tải trọng phụ thuộc vào chiều dài cánh tay, cấu hình gia tốc và chu kỳ làm việc chứ không chỉ phụ thuộc vào mô-men xoắn của bộ truyền động. Đối với rô-bốt sáu trục tầm với 800mm điển hình có ND-A5215-10 ở khớp 2, 3 và 4, cũng như các bộ truyền động nhỏ hơn ở khớp cổ tay, tải trọng tối đa là khoảng 10-15kg khi tăng tốc 1g với chu kỳ làm việc 50%. Tập đoàn iHF cung cấp các công cụ mô phỏng động học để tối ưu hóa việc lựa chọn bộ truyền động cho các yêu cầu chuyển động và hình dạng robot cụ thể.
Câu hỏi: ND-A5215-10 có thể hoạt động mà không cần làm mát bằng chất lỏng trong môi trường xung quanh có nhiệt độ lên tới 40°C không?
Trả lời: Biến thể làm mát bằng không khí duy trì mô-men xoắn định mức liên tục ở nhiệt độ môi trường lên tới 35°C với sự đối lưu tự nhiên và lên đến 40°C với mức giảm tới 80% mô-men xoắn định mức. Để hoạt động liên tục ở nhiệt độ trên 40°C hoặc trong các hệ thống lắp đặt hạn chế với luồng không khí hạn chế, nên làm mát bằng chất lỏng. Dịch vụ mô phỏng nhiệt của Tập đoàn iHF có thể dự đoán hiệu suất cho các điều kiện lắp đặt cụ thể.
Hỏi: Khoảng thời gian bảo trì nào được khuyến nghị cho bộ giảm tốc truyền động điều hòa?
Trả lời: Trong điều kiện vận hành bình thường (mô-men xoắn định mức, tải va đập vừa phải, bôi trơn đầy đủ), bộ truyền động điều hòa flexspline thể hiện tuổi thọ mỏi vượt quá 10.000 giờ hoạt động. Tập đoàn iHF khuyến nghị kiểm tra hàng năm tình trạng vòng bi đầu ra thông qua phân tích độ rung và thay thế chất bôi trơn sau mỗi 5.000 giờ hoạt động hoặc 2 năm, tùy điều kiện nào xảy ra trước. Các chức năng giám sát tình trạng tích hợp có thể mở rộng các khoảng thời gian này thông qua các thuật toán bảo trì dự đoán.
Câu hỏi: ND-A5215-10 có tương thích với bộ điều khiển servo của bên thứ ba không?
Trả lời: ND-A5215-10 được tối ưu hóa để tích hợp với bộ điều khiển servo tích hợp của Tập đoàn iHF, nhưng các thông số động cơ (điện trở pha, độ tự cảm, hằng số EMF ngược, giao thức bộ mã hóa) được ghi lại để hỗ trợ tích hợp bộ điều khiển của bên thứ ba. Khách hàng nên xác minh tính tương thích của băng thông vòng lặp hiện tại và thuật toán chuyển mạch với nhóm kỹ thuật ứng dụng của Tập đoàn iHF trước khi chỉ định bộ điều khiển không tích hợp.
Câu hỏi: Thông số kỹ thuật phản ứng dữ dội là gì và nó ảnh hưởng như thế nào đến khả năng lặp lại của robot?
Trả lời: Bộ giảm tốc điều hòa đạt được phản ứng ngược bằng 0 nhờ hình học chia lưới đàn hồi của nó. Độ trễ đo được ở trục đầu ra thường là ±3 giây cung trong điều kiện không tải. Trong các ứng dụng rô-bốt thực tế, việc tuân thủ cấu trúc và độ phân giải của bộ mã hóa chi phối khả năng lặp lại thay vì phản ứng ngược của bánh răng, trong đó ND-A5215-10 đóng góp ít hơn 5% vào tổng số lỗi lặp lại của hệ thống trong các chuỗi động học được thiết kế tốt.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Yêu cầu báo giá
Yêu cầu báo giá