Sự phát triển của robot tiên tiến—từ robot cộng tác (cobot) và khớp nối công nghiệp cho đến hệ thống hai chân hình người—đòi hỏi mật độ năng lượng, độ cứng xoắn và độ chính xác định vị chưa từng có. Trung tâm của mọi chuyển động có khớp nối là mô-đun truyền động. Để đáp ứng những hạn chế cơ học nghiêm ngặt này, các kiến trúc tự động hóa hiện đại yêu cầu hộp số động cơ khớp rô-bốt tích hợp cao giúp thống nhất hiệu suất điện từ với khả năng giảm phản ứng cơ học bằng không.
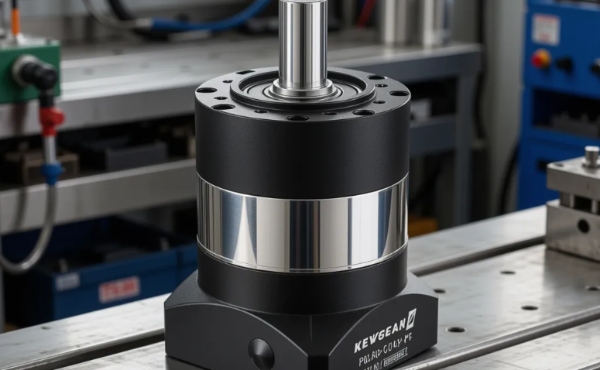
Là nhà tiên phong hàng đầu về các giải pháp điều khiển chuyển động và truyền động công nghiệp, Tập đoàn iHF đã chế tạo một mô-đun truyền động servo tích hợp hiện đại. Bằng cách kết hợp động cơ nam châm vĩnh cửu mô-men xoắn cực thấp với bộ giảm tốc bánh răng hành tinh có độ chính xác cao, Tập đoàn iHF cung cấp nền tảng cơ học cần thiết cho các hệ thống robot thế hệ tiếp theo.
⚙️1. Hộp số động cơ chung Robot là gì?
Hộp số động cơ khớp robot là một hệ thống cơ điện tích hợp được sử dụng trong các khớp robot để chuyển đổi đầu ra tốc độ cao, mô-men xoắn thấp của động cơ thành chuyển động tốc độ thấp, mô-men xoắn cao với khả năng điều khiển chính xác. Nó thường kết hợp một động cơ servo hoặc động cơ không chổi than, hộp số chính xác (thường là hộp số giảm tốc hành tinh hoặc xoắn ốc) và hệ thống phản hồi như bộ mã hóa để đạt được điều khiển vòng kín về mô-men xoắn, tốc độ và vị trí. Điều này cho phép các khớp robot duy trì hoạt động ổn định ở tốc độ thấp, đảo chiều nhanh, mật độ mô-men xoắn cao, độ rung thấp và hiệu suất tiếng ồn thấp. Các thiết kế tiên tiến cũng tối ưu hóa cấu trúc khe động cơ để cải thiện hiệu suất mô-men xoắn, giảm mô-men xoắn bánh răng để chuyển động mượt mà hơn và có thể kết hợp bộ mã hóa kép để nâng cao độ chính xác. Trong cấu hình cao cấp, nhiều thiết bị có thể được kết nối thông qua giao tiếp chuỗi vòng để đơn giản hóa việc truyền tải điện và dữ liệu trong các hệ thống robot đa trục. Nhìn chung, nó là thành phần cốt lõi cho phép chuyển động chính xác trong rô-bốt công nghiệp, rô-bốt cộng tác và hệ thống chuyển động tự động.


🔩 2. Kiến trúc chức năng cốt lõi của hộp số động cơ khớp robot
Hệ thống hộp số động cơ khớp robot tích hợp công nghệ truyền động động cơ với các cơ chế giảm tốc có độ chính xác cao, cho phép điều khiển chuyển động trong các khớp robot.
Các chức năng chính của nó bao gồm:
● khuếch đại mô-men xoắn
● giảm tốc độ và ổn định
● kiểm soát vị trí chính xác
● chuyển hướng mượt mà
Điều này cho phép robot thực hiện các chuyển động phức tạp với độ lặp lại và độ chính xác cao.
🎯 3. Ưu điểm chính về hiệu suất
⚡ 3.1 Điều khiển chính xác ở tốc độ thấp
Một trong những yêu cầu quan trọng nhất của robot là hoạt động ổn định ở tốc độ thấp. Hệ thống duy trì:
● đầu ra mô-men xoắn nhất quán
● độ chính xác của chuyển động vi mô
● hành vi quay trơn tru
Điều này rất cần thiết cho các nhiệm vụ như lắp ráp, hàn và robot phẫu thuật.
🔄 3.2 Khả năng đảo hướng nhanh chóng
Hộp số cho phép động cơ phản ứng nhanh khi thay đổi hướng, cải thiện:
● hiệu quả thời gian chu kỳ
● chuyển động linh hoạt
● khả năng phản hồi động của cánh tay robot
🔁 3.3 Hệ thống điều khiển vòng kín
Một tính năng chính của hệ thống khớp robot hiện đại là điều khiển phản hồi vòng kín, cho phép:
● kiểm soát mô-men xoắn
● quy định tốc độ
● định vị góc chính xác
Điều này đảm bảo rằng các chuyển động của robot được điều chỉnh liên tục theo thời gian thực để có độ chính xác tối đa.
🌊 3.4 Hoạt động ít rung và ồn
Thiết kế kết cấu được tối ưu hóa giúp giảm thiểu sự mất ổn định cơ học, dẫn đến:
● biên độ rung giảm
● tiếng ồn âm thanh thấp
● hiệu suất hoạt động mượt mà hơn
Điều này đặc biệt quan trọng đối với các robot cộng tác làm việc gần con người.
🧠 4. Tính năng thiết kế kỹ thuật nâng cao
🧩 4.1 Thiết kế khe cắm động cơ mật độ mô-men xoắn cao
Động cơ được thiết kế với hình dạng khe tối ưu, cải thiện:
● hiệu suất điện từ
● đầu ra mật độ mô-men xoắn
● giảm mô men xoắn
Điều này cho phép hiệu suất cao hơn trong các cấu trúc khớp robot nhỏ gọn.
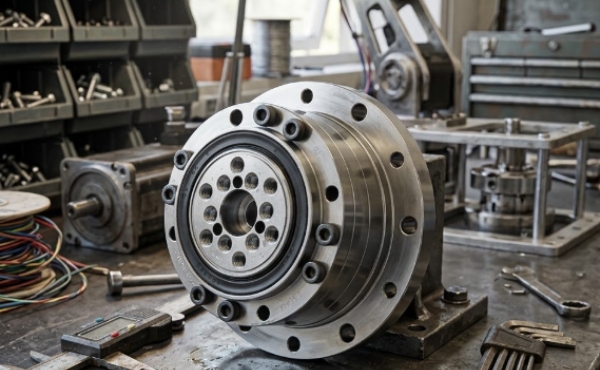
⚙️ 4.2 Bộ giảm tốc bánh răng hành tinh có độ chính xác cao
Cốt lõi của hộp số là hệ thống bánh răng hành tinh xoắn ốc, được thiết kế để:
● hiệu suất truyền tải cao
● chuyển đổi mô-men xoắn ổn định
● giảm phản ứng cơ học
Hệ thống đạt được độ chính xác về độ tròn của chân răng dưới 3 phút cung, đảm bảo độ chính xác về vị trí đặc biệt trong điều khiển chuyển động của robot.
🎛️ Hệ thống phản hồi bộ mã hóa kép 4.3
Cấu hình nâng cao hỗ trợ bộ mã hóa kép, giúp tăng cường đáng kể:
● độ chính xác của vị trí
● độ phân giải phản hồi mô-men xoắn
● tính dự phòng và tính ổn định của hệ thống
Điều này cho phép robot di chuyển cực kỳ chính xác trong môi trường tự động hóa cao cấp.
🔗 4.4 Kiến trúc truyền thông chuỗi Daisy
Hệ thống hỗ trợ cấu hình chuỗi vòng, cho phép:
● kiến trúc hệ thống dây điện đơn giản hóa
● giảm độ phức tạp của việc cài đặt
● truyền tải điện và dữ liệu tích hợp qua nhiều khớp nối
Điều này đặc biệt có giá trị trong các hệ thống robot đa trục và nền tảng robot hình người.
🏭 5. Ứng dụng công nghiệp của hệ thống hộp số động cơ khớp robot
🤖 Robot công nghiệp
Được sử dụng trong cánh tay robot để hàn, lắp ráp và xử lý vật liệu.
🏥 Robot y tế
Hỗ trợ các robot phẫu thuật yêu cầu độ chính xác chuyển động cực cao.
🧑🤝🧑 Robot cộng tác (Cobots)
Cho phép tương tác giữa người và robot an toàn, trơn tru với độ ồn và độ rung thấp.
🚗 Sản xuất ô tô
Được sử dụng trong dây chuyền lắp ráp chính xác và hệ thống sản xuất tự động.
📦 Tự động hóa hậu cần
Hỗ trợ hệ thống phân loại, lấy hàng và đóng gói bằng robot.

🏗️ 6. Tầm quan trọng về mặt kỹ thuật của việc lựa chọn hộp số
Việc lựa chọn hộp số động cơ khớp robot phù hợp là rất quan trọng vì nó ảnh hưởng trực tiếp đến:
● độ chính xác của chuyển động
● khả năng chịu tải
● sự ổn định của hệ thống
● tuổi thọ sử dụng
● hiệu quả năng lượng
Thiết kế hộp số kém có thể dẫn đến:
● lỗi phản ứng dữ dội
● quá nóng
● rung động không ổn định
● giảm độ chính xác của robot
🏢 7. Đổi mới kỹ thuật của Tập đoàn iHF trong Hệ thống chuyển động robot
Là nhà sản xuất chuyên biệt về hệ thống chuyển động và truyền động, Tập đoàn iHF phát triển các giải pháp hộp số động cơ khớp rô-bốt hiệu suất cao được thiết kế cho chế tạo rô-bốt hiện đại.
Phương pháp kỹ thuật của họ tập trung vào:
● thiết kế bánh răng hành tinh hiệu quả cao
● tích hợp động cơ chính xác
● tỷ lệ mô-men xoắn trên kích thước được tối ưu hóa
● kiến trúc cơ học có độ ồn thấp
● khả năng tương thích kiểm soát phản hồi nâng cao
Thay vì cung cấp các bộ phận cơ khí chung chung, Tập đoàn iHF nhấn mạnh đến việc tối ưu hóa chuyển động ở cấp độ hệ thống, đảm bảo tích hợp liền mạch vào các nền tảng robot tiên tiến.
🚀 8. Xu hướng tương lai về công nghệ hộp số động cơ khớp robot
Ngành công nghiệp robot đang phát triển nhanh chóng, thúc đẩy sự đổi mới trong hệ thống hộp số:
● Bù chuyển động do AI điều khiển
● thu nhỏ mật độ mô-men xoắn cao hơn
● hệ thống bánh răng phản ứng ngược cực thấp
● bộ truyền động thông minh được tích hợp đầy đủ
● cải thiện hiệu quả sử dụng năng lượng cho robot hình người
Những xu hướng này sẽ xác định thế hệ tiếp theo của hệ thống chuyển động robot thông minh.
🧾 9. Câu hỏi thường gặp: Hộp số động cơ khớp robot
❓ Điều gì khiến hộp số mô tơ khớp robot khác với hộp số thông thường?
Nó tích hợp điều khiển động cơ và giảm độ chính xác trong một hệ thống duy nhất được tối ưu hóa cho độ chính xác của chuyển động robot.
❓ Tại sao độ rung thấp lại quan trọng trong chế tạo robot?
Độ rung thấp đảm bảo độ chính xác cao hơn, chuyển động mượt mà hơn và cải thiện độ an toàn khi tương tác giữa người và robot.
❓ Vai trò của hộp số hành tinh trong chế tạo robot là gì?
Nó cung cấp mật độ mô-men xoắn cao, cấu trúc nhỏ gọn và truyền chuyển động ổn định cho các khớp robot.
❓ Tại sao phải sử dụng bộ mã hóa kép trong khớp nối robot?
Bộ mã hóa kép cải thiện độ chính xác phản hồi, độ dự phòng và độ ổn định của điều khiển chuyển động vòng kín.
❓ Ngành nào được hưởng lợi nhiều nhất từ các hệ thống này?
Tự động hóa công nghiệp, robot y tế, hệ thống hậu cần, sản xuất ô tô và robot cộng tác.
🧾 Kết luận: Chuyển động chính xác xác định tương lai của robot
Hộp số động cơ khớp robot là thành phần nền tảng trong chế tạo robot hiện đại, cho phép điều khiển chuyển động chính xác, ổn định và thông minh trên nhiều ứng dụng khác nhau.
Với các tính năng kỹ thuật tiên tiến như điều khiển vòng kín, phản hồi bộ mã hóa kép, độ chính xác của bánh răng hành tinh và vận hành ít rung, những hệ thống này rất cần thiết cho hiệu suất của robot thế hệ tiếp theo.
Thông qua đổi mới liên tục, Tập đoàn iHF cung cấp các giải pháp chuyển động có độ chính xác cao giúp các nhà sản xuất robot đạt được hiệu quả, độ chính xác và độ tin cậy của hệ thống cao hơn trong môi trường tự động hóa ngày càng phức tạp.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Yêu cầu báo giá
Yêu cầu báo giá