
 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Yêu cầu báo giá
Yêu cầu báo giá 
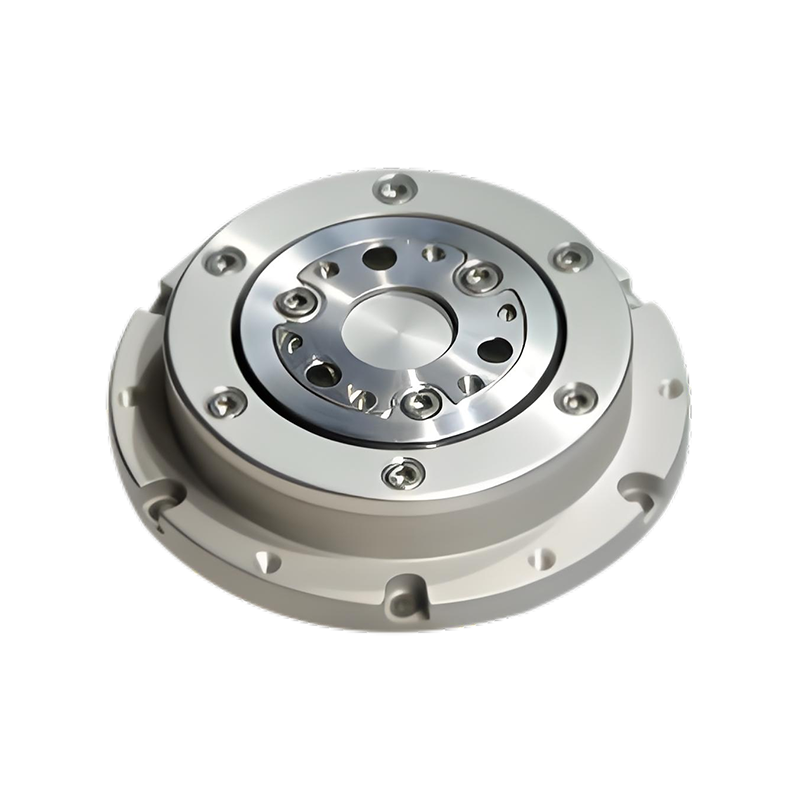
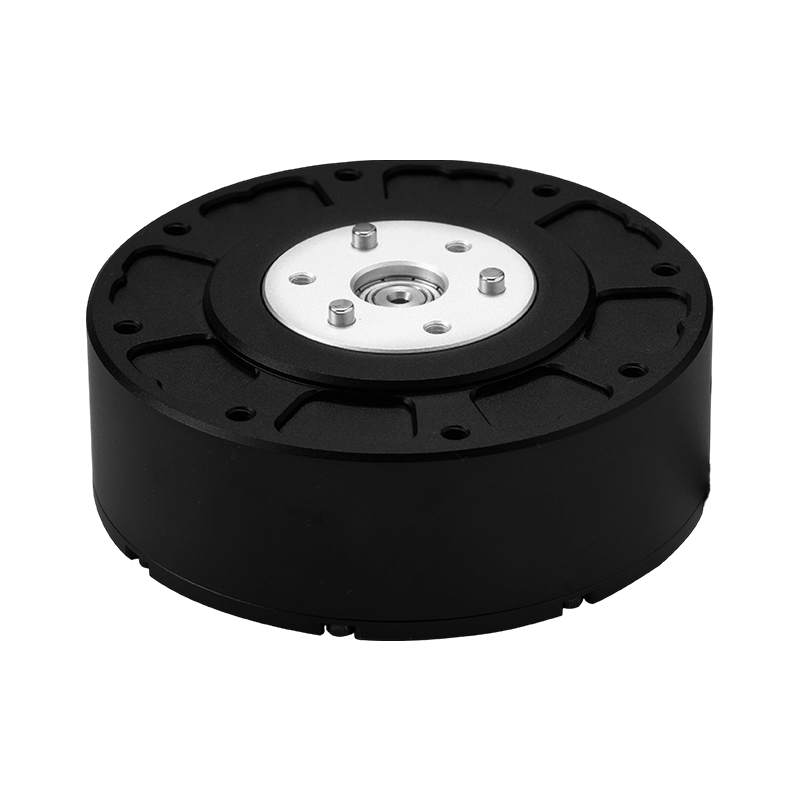
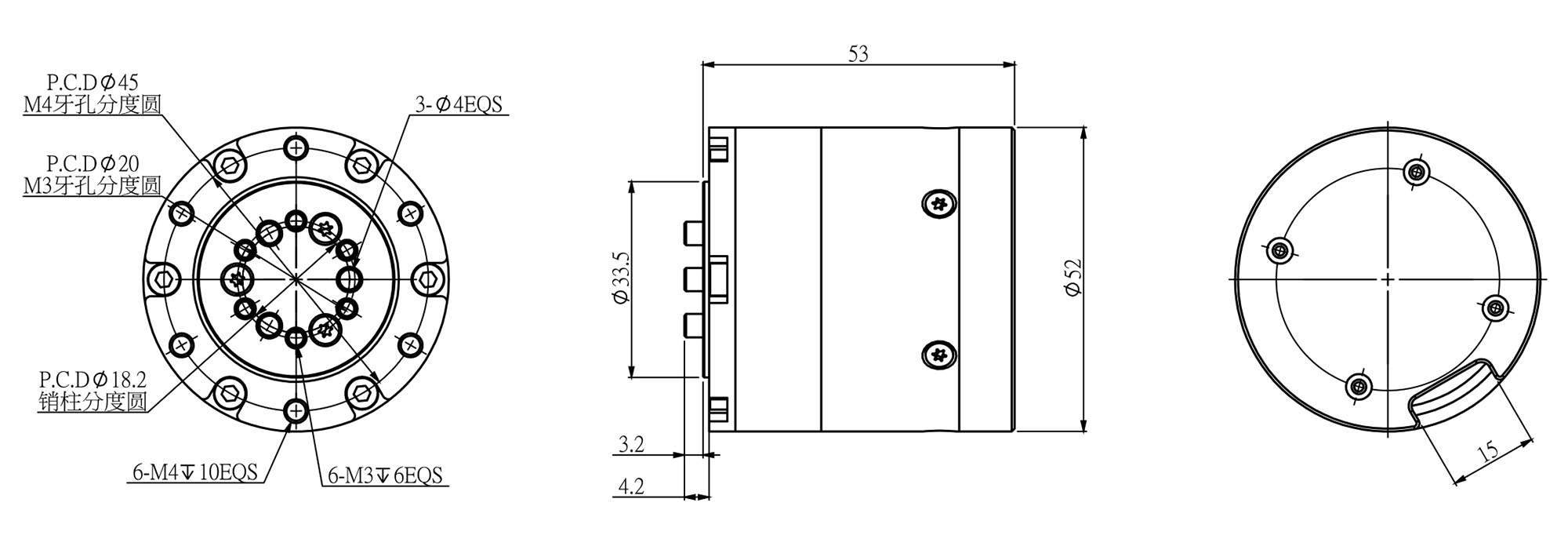
Thiết bị truyền động động cơ chung Robot: ND-A5216-10
Gửi yêu cầu ngay
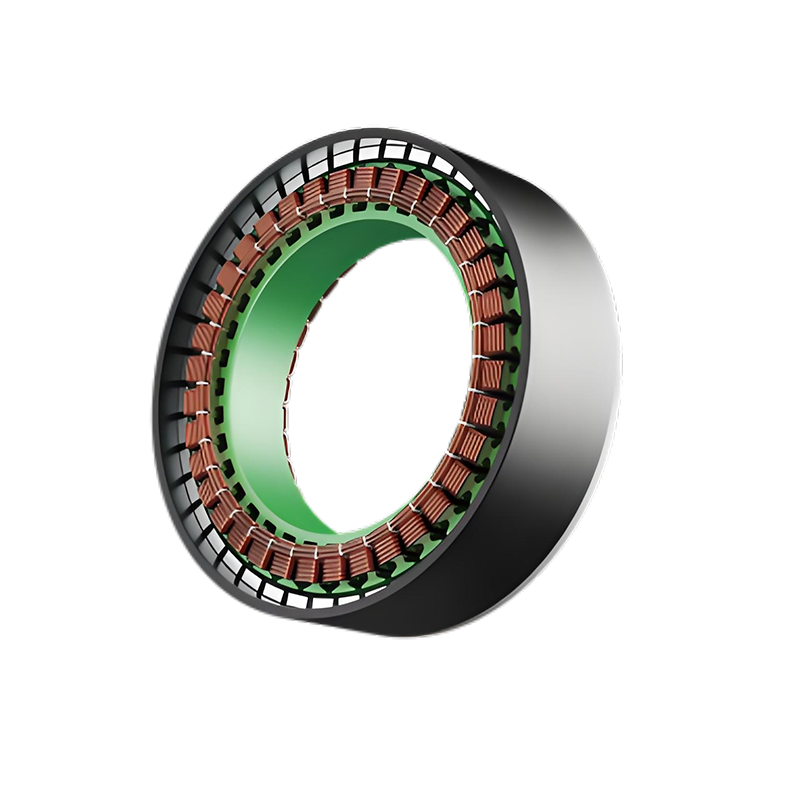
Productfeatures:
· Duy trì điều khiển chính xác ở tốc độ thấp
· Cho phép đảo chiều động cơ nhanh chóng
· Đạt được khả năng kiểm soát vòng kín về mô-men xoắn, tốc độ và vị trí
· Phản ứng nhanh, vận hành ổn định, ít rung, ít ồn
· Thiết kế khe động cơ được tối ưu hóa, mật độ mô-men xoắn cao và mô-men xoắn tối ưu hóa
· Bộ giảm tốc bánh răng hành tinh có độ chính xác cao (bánh răng xoắn ốc), có độ tròn chân răng dưới 3 phút cung
· Hỗ trợ bộ mã hóa kép để nâng cao hơn nữa độ chính xác của điều khiển phản hồi
· Hỗ trợ cấu hình chuỗi xích cho nhiều thiết bị, hỗ trợ cấp nguồn và truyền dữ liệu










| ND-A4012-25 Joint Actuator | ||
| Model | Unit | Value |
| Ratio | / | 25 |
| Rated Voltage | V | 48 |
| Rated Current | A | 4.5 |
| Rated Power | w | 200 |
| Rated Torque | Nm | 3.5 |
| Peak Torque | Nm | 10 |
| Rated Speed | RPM | 120 |
| Peak Speed | RPM | 150 |
| Overall Efficiency | % | 85 |
| Gearback | Arcmin | <20 |
| Torque Density | Nm/kg | 29.4 |
| Weight | g | 330±10 |
| Dimensions | Mm | Ф52-53 |
| Communication Protocol | / | |
| Baud Rate | / | |
| Encoder | / | |